Advanced driver assistance systems (ADAS) are the first step toward a fully automated future. Features like emergency braking and adaptive cruise control already help drivers on the road and reduce the risk of error. But the performance of these systems isn’t always perfect. That’s why before hitting the road, advanced driver assistance systems in autonomous cars have to go through different ADAS testing processes to prove their safety.
Let’s take a closer look at self driving car testing and the most common ways for ADAS system testing.
Modern methods for ADAS testing go beyond real test drives

The common way to test any car is to hold test drives. These can happen in different places such as highways, cities, or special test tracks. Test drives are useful for self-driving car testing because they can measure a vehicle’s performance in real-world situations.
But here’s the rub: testing of autonomous vehicles differs from testing of ordinary cars. Just imagine how risky it is to measure collision avoidance on the road. Basically, it’s impossible. So real-world testing won’t cover many unexpected scenarios that a vehicle can get into. And because of that, evaluating a car’s on-road performance isn’t the best idea for automotive pentesting and ADAS testing.
Moreover, real-world tests are expensive and time-consuming. Think of how high the cost of self-driving car testing could go if a vehicle got into an accident. Not to mention that test drives are dangerous for everyone, especially the driver. All in all, road testing alone won’t ensure a vehicle’s safety. In fact, real-world test drives are actually the last step in the ADAS development cycle. Modern auto manufacturers conduct most of their autonomous vehicle testing in a lab.
What are the safe ways of ADAS testing in autonomous cars?
To verify and test the ADAS software for autonomous driving, OEMs use virtual environment simulation, X-in-the-loop approaches, and augmentation of measured data. These testing methods lower risks and cut production costs in the earlier stages of SDLC.
Virtual environment simulation
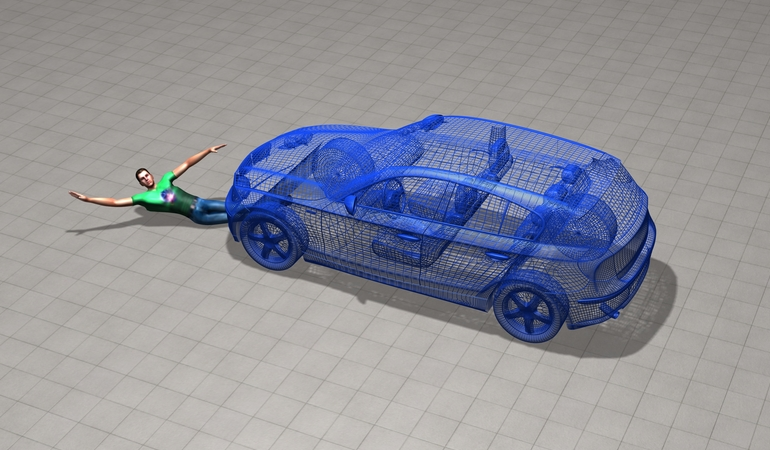
Creating a virtual environment for ADAS system testing means modeling a complete driving scenario using software. This includes the driver, sensors, traffic, and realistic vehicle dynamics. In contrast with real-world testing, virtual environment simulation is safe. Also, it allows testing self-driving cars in various scenarios. A virtual environment helps to validate many aspects of vehicles at a time, decreasing development costs where possible.
Moreover, virtual environments for ADAS testing help to prototype and develop new system features. They help researchers create more reliable ADAS and integrate different advanced driver assistance systems to develop better autonomous driving technology.
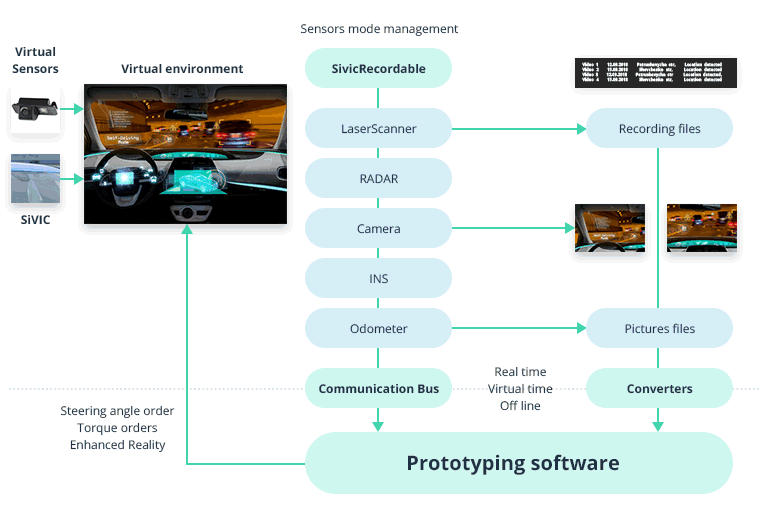
ADAS prototyping with a virtual environment using the SiVIC platform
X-in-the-loop simulation methods
X-in-the-loop approaches usually combine both real-world and simulated elements for ADAS and autonomous car testing. Thanks to these methods, auto manufacturers can check the performance of specific car components early in development. Take a look at common X-in-the-loop approaches for testing of autonomous vehicle systems.
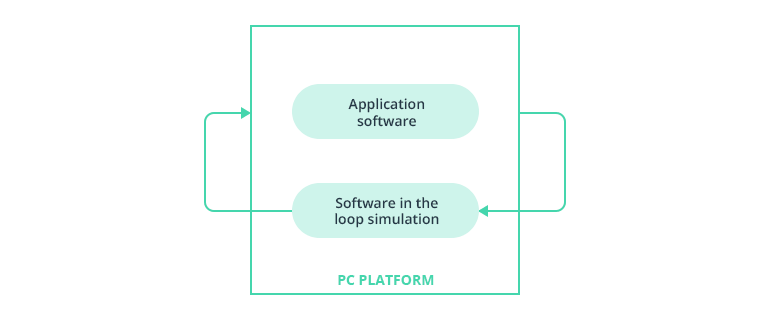
Software-in-the-loop (SIL)
SIL is a way to test some components of ADAS software. This method involves linking the algorithms that correspond to a certain vehicle’s hardware to the simulation. By using software-in-the-loop, developers can check code performance in a simulated environment without actual hardware parts.
Hardware-in-the-loop (HIL)
Previously, HIL was a tool for developing a car’s engine and vehicle dynamic controllers. Now, it’s a popular method for ADAS and autonomous car testing. The hardware-in-the-loop approach means using real-time simulation for checking a vehicle’s hardware. The HIL method is flexible and great for prototyping.
Here’s how it works. In HIL simulation, a vehicle’s real hardware is combined with simulated or artificial components.
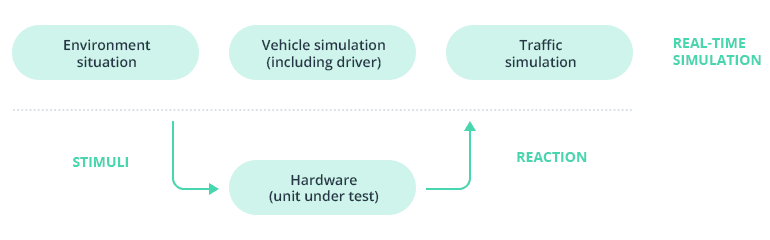
In a typical HIL testing process, a hardware test unit operates in a simulated environment.
Driver-in-the-loop (DIL)
DIL simulation happens when real people drive a simulated vehicle that has controls similar to a real vehicle and operates in a virtual environment. This approach supports using input from human drivers for the development of ADAS even before the actual car is ready.

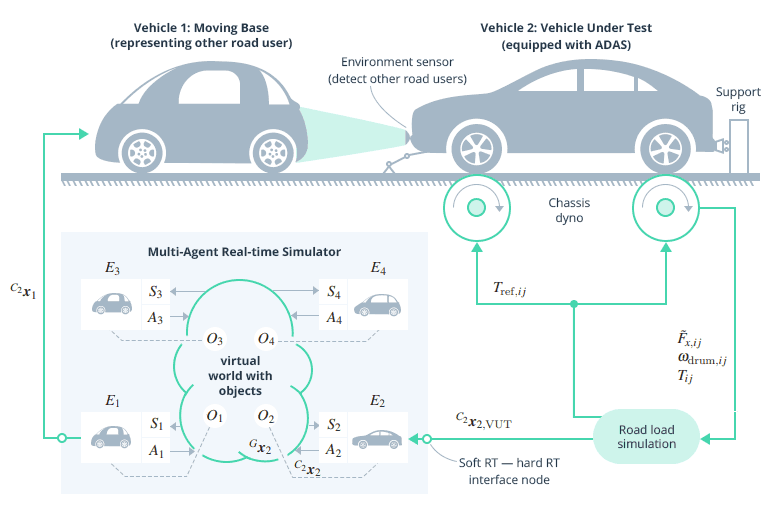
Vehicle-hardware-in-the-loop (VEHIL)
VEHIL is a multi-agent simulation. This means that, besides a real autonomous vehicle, several other artificial robotic platforms are in the lab. By using the VEHIL method, you can test a vehicle’s performance with targets that simulate other vehicles on the road. So yes, there is a way that you can actually test collision avoidance and adaptive cruise control. Here’s how the VEHIL closed loop works.
Vehicle-in-the-loop (VIL)
With the VIL method, a real autonomous vehicle and a human driver inside it operate in a simulated environment. The vehicle drives in virtual traffic either by itself or controlled by the driver when needed. The vehicle-in-the-loop method is useful for studying human behavior inside an autonomous car. For instance, it’s good at evaluating warning systems and how people react to them.

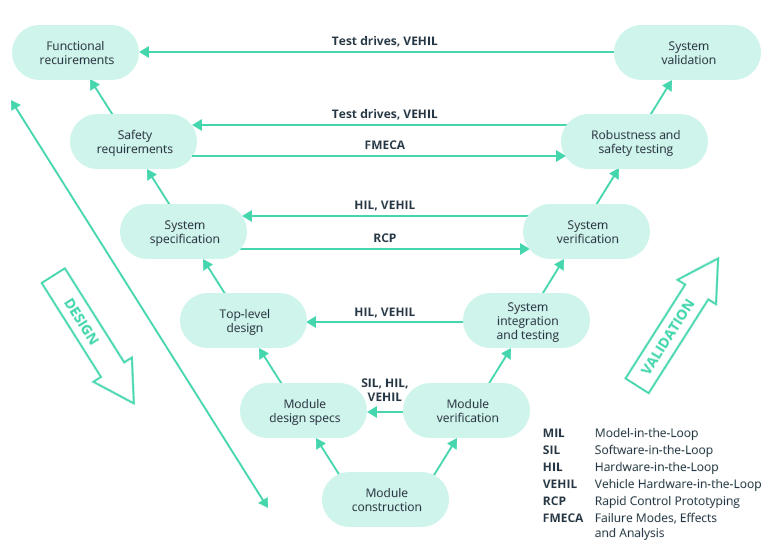
This is how different X-in-the-loop approaches to autonomous vehicle testing correspond to the different levels of the ADAS development process.
ADAS development process using V-Model
Augmentation of measured data during ADAS system testing
Another way of testing that blends real-world driving and virtual simulation is the augmentation of measured data. This method is particularly useful for testing autonomous vehicle perception systems.
Take real video sequences from test drives, for example. They can serve as a background in simulations. Along with different objects that appear on the screen, developers can add virtual ones. And that’s how real and virtual data come together to improve a car’s perception. They both help to test and train an autonomous car’s classification abilities.
The competition on the ADAS market is fierce
Advanced driver assistance systems are already available on the market. No doubt their number will only grow in future. And that will happen thanks to the critical role of these systems in car safety. ADAS features have proven vital for safe driving. In fact, all European and American cars will need to have autonomous emergency braking systems and forward-collision warning systems by 2020.
The global level 1 ADAS market will reach 16.8 billion USD by 2025.
Beyond that, with the autonomous car race continuing, the fight over the best ADAS is getting real. Everyone knows that ADAS is the foundation for the driverless future. Basically, ADAS features help vehicles climb up the autonomy ladder. That’s why OEMs are now competing to provide the best solutions and win over customers. The fact is that advanced driver assistance systems will only get better and will eventually evolve into fully autonomous systems.
The introduction of advanced driver assistance systems (ADAS), like parking distance control (PDC) or the radar-based speed and distance control (ACC), in the nineties of the last century was a logical step. The enormous increase of the performance of these ADAS in the last years will now make the next step realizable – to give the driver the possibility to completely delegate the driving task to the car if he wants to do so.
Self-driving car testing matters. It ensures vehicle quality and helps to save lives. But since real-world testing of self-driving vehicles is too dangerous and expensive, OEMs need to test autonomous cars in the lab, not on the road. Remarkably, there are other methods for how to test self-driving cars. Virtual environments, X-in-the-loop methods, and augmentation of measured data are safe ways of testing an autonomous car. They help auto manufacturers create prototypes and find mistakes in the early development stages. This leads to savings of both time and money. But most importantly, the testing of autonomous vehicle systems will make roads safer for everyone.
Intellias’ experts know exactly how to test and implement up-to-date ADAS features in cars. Contact us to develop safe, smart, and unique advanced driver assistance systems for your vehicles.



