The past decade has pushed software-defined vehicles (SDVs) from industry buzzword to baseline expectation. Automotive innovation today moves faster in code than in hardware yet integrating and validating that code inside real vehicles still slow development for most automotive manufacturers.
Traditional benches and vehicle prototypes can’t keep pace with modern CI/CD cycles, and engineering teams increasingly struggle to scale testing, reproduce issues, and maintain compliance.
This is where the rise of the virtual ECU ecosystem is changing the equation. By testing software on virtual ECU (vECU) long before hardware exists, automotive companies are transforming integration, validation, and the economics of their SDV programs.
The need for virtualized hardware testing
Even the most advanced OEMs are moving beyond traditional hardware setups, which serialize work, slow feedback loops, and reveal defects only at the most expensive stages of development. You can’t meaningfully parallelize thousands of scenarios or reliably reproduce edge cases. Real network behavior (CAN, FlexRay, Ethernet, DoIP) often remains untested until late integration weeks.
In addition, hardware swaps, flaky harnesses, unstable power supplies, and limited lab time often turn CI into a scheduling challenge rather than an engineering tool.
This is exactly where the virtualized ECU approach transforms the process. By running production software at the abstraction level, engineering teams can virtualize communication early in the cloud, shifting most integration and automotive ECU validation in virtual environment. Hardware labs are used only for what only hardware can prove, while everything else becomes repeatable, reproducible, and fully traceable.
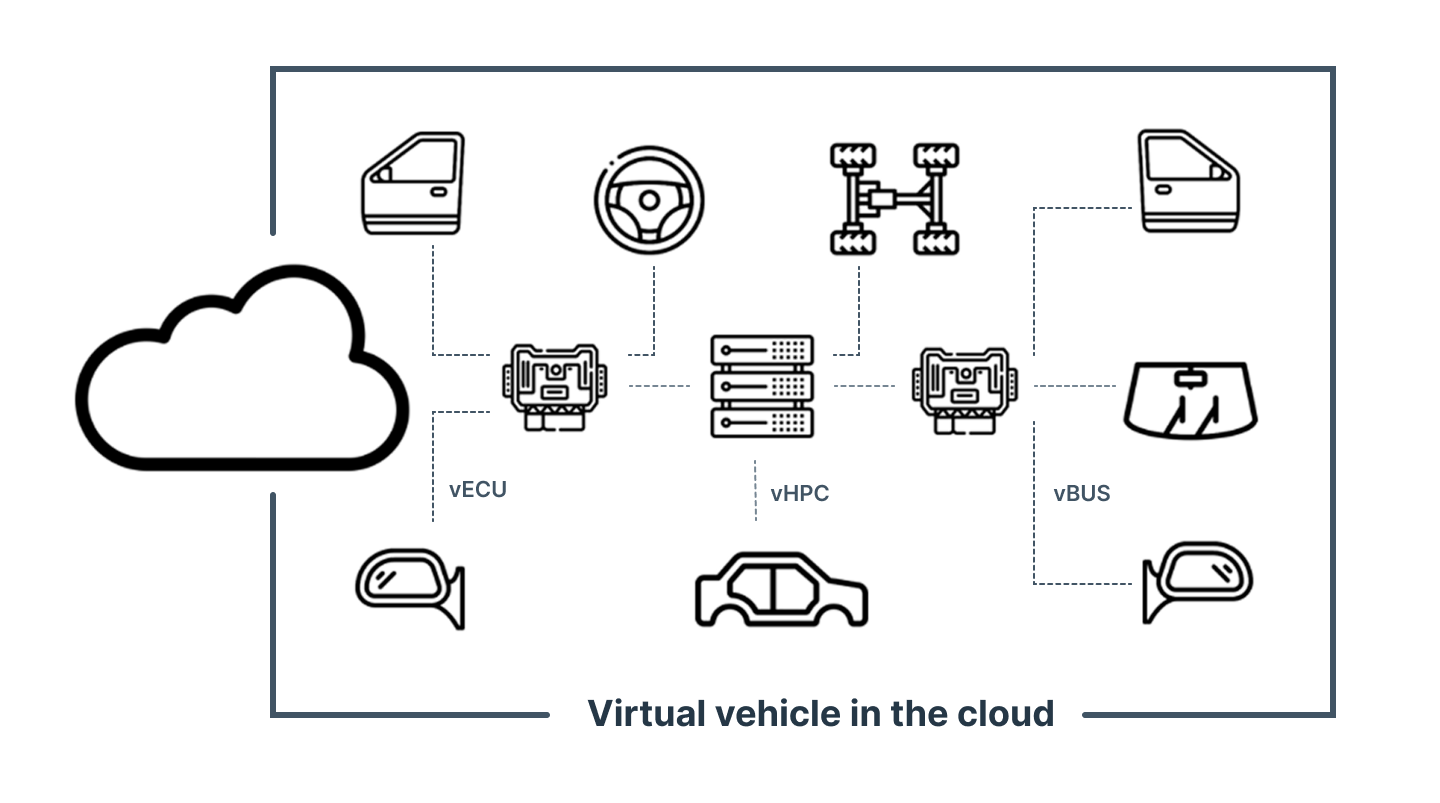
Source: SDV Guide – Digital Auto
In this model, traceability becomes a natural by-product of the CI pipeline rather than a manual deliverable. A flexible combination of vECU execution and cloud-based testing moves integration upstream, accelerates defect discovery, and frees engineering benches to focus on true hardware issues.

ECU virtualization levels
Virtualization levels define a structured progression from lightweight, abstract simulations to high-fidelity, near-hardware execution. Each level serves a specific purpose, balancing speed, cost efficiency, and accuracy as automotive software development matures.
Level 0 vECU: Controller model
Represents the ECU at a high abstraction level, focusing on core control logic and early functional validation without dependencies on software stacks.
Level 1 vECU: Application level
Introduces real software applications, enabling developers to validate application-layer behavior, data flow, and interaction logic.
Level 2 vECU: Simulated BSW
Adds a simulated Basic Software (BSW) layer, allowing more detailed verification of middleware behavior and system services in a controlled virtual environment.
Level 3 vECU: Production BSW
Runs production-grade BSW components, ensuring compatibility, integration, and realistic system interactions as software gets closer to deployment readiness.
Level 4 vECU: Target binary
Deploys the actual target binary, providing execution conditions that closely mirror hardware behavior and enabling final validation before HIL or physical ECU testing.

Source: SDV Guide – Digital Auto
This leveled approach makes early development fast and cost-effective, while supporting a smooth transition toward higher-fidelity testing as projects approach integration and release milestones.
How and why virtualization works
A virtual ECU is a software-in-the-loop representation of an automotive ECU that lets OEMs integrate, test, and debug independently of physical rigs. Mature platforms now support multiple abstraction levels: application, middleware, OS, and standard automotive interfaces, making virtual ECUs for automotive testing both scalable and practical for modern SDV programs. As part of this landscape, Virtual Electronic Control Units (vECU) have become essential for enabling meaningful early integration and large-scale CI testing.
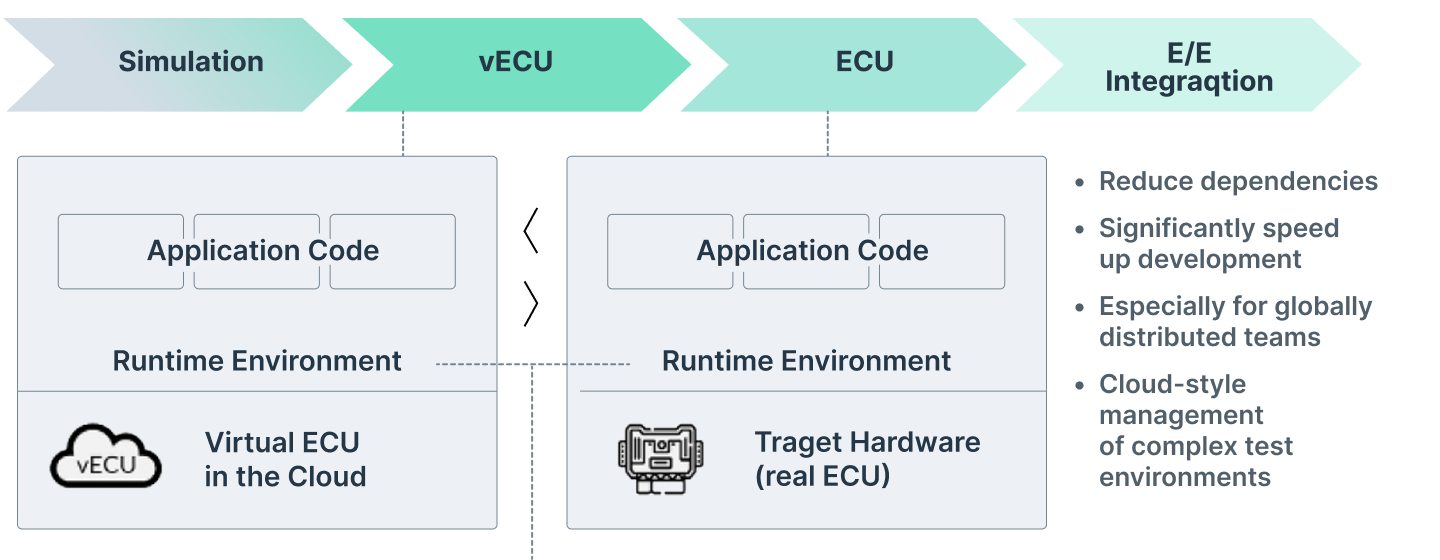
Source: SDV Guide – Digital Auto
Here’s what happens in practice: a change lands, and the pipeline wakes up. It pulls the latest ECU code and tests, builds them into an executable form for the virtual ECU, and spins up a clean embedded software model alongside a simulated in-vehicle network. Tests run in parallel in the cloud, so what once queued behind scarce benches now completes in minutes.
As results return, logs and metrics are captured automatically and linked to relevant requirements, generating safety and security evidence without extra effort. If anything fails to meet the quality bar, the change is stopped; if it passes, it merges. The workflow remains simple and deterministic: commit, exercise the software in a faithful virtual environment, collect proof, and ship only what’s green.
The reference stack
V-ECU Runtime
Several platforms make virtualized testing practical across vECU levels 0–3, providing the flexibility needed for different abstraction layers and SDV development workflows.
Synopsys Silver supports V-ECUs for application-, middleware-, and OS-level integration, enabling early testing and full virtual ECU execution long before hardware samples are available. Its collaboration with AWS further enhances large-scale validation, giving engineers deeper visibility into chip behavior, software performance, and overall system health across entire SDV programs.
ETAS VECU-BUILDER generates virtual ECUs as FMI 2.0/3.0 co-simulation FMUs, making them portable across toolchains and easy to integrate into existing SIL pipelines. When paired with ISOLAR-EVE, it provides an efficient path for AUTOSAR-centric workflows, allowing teams to reuse configurations, BSW modules, and test assets without major rework.
Network and rest-bus simulation
Elektrobit EB Assist is a mature tooling and hardware family widely used in ADAS and automated driving development. It supports data capture and replay, bus and rest-bus simulation, and provides a modular framework for building and validating perception and control pipelines.
In a V-ECU context, EB Assist delivers high-fidelity rest-bus and network simulation — including CAN, FlexRay, and Ethernet feeds, along with synchronized logging. ADTF complements this setup by hosting and coordinating the overall processing pipeline, ensuring deterministic execution and reproducible test scenarios across virtualized environments.
Cloud & Compliance Backbone
For large-scale execution and compliance workflows, the underlying infrastructure becomes more generic, and cloud driven. AWS Graviton offers an efficient ARM-based compute ideal for automotive workloads, while managed artifact repositories and log services provide a scalable environment for continuous integration and automated regression testing.
Polarion Automotive completes the stack by unifying requirements, change and variant management, test management, and audit-ready evidence across the lifecycle. It ensures end-to-end traceability and supports compliance with ISO 26262, ASPICE, and ISO/SAE 21434 through prebuilt templates and automated documentation flows.
Design choices that pay off
Time-to-first-test
Aim to keep the feedback loop within single-digit minutes after each commit. Rapid iteration has a stronger impact on engineering quality and team behavior than any dashboard or report.
Shift left
Virtualize the majority of integration tests before moving to physical rigs. L1–L3 V-ECUs (e.g., Synopsys Silver) and FMU-based workflows (e.g., ETAS VECU-BUILDER) allow teams to retire “bench-first” setups without sacrificing fidelity. Choosing when and how to rely on the virtual ECU becomes a strategic decision that dictates both the speed and stability of the development pipeline.
Pick the right abstraction
Avoid over-modeling. Most programs achieve the best ROI at L2/L3, where OS-level fidelity is sufficient, and full plant modeling becomes unnecessary overhead.
Mirror the buses early
Many late-stage surprises stem from mismatched CAN, FlexRay, or Ethernet behavior. Cal/XCP workflows and EB Assist toolchains help de-risk communication before hardware integration begins.
Keep cloud and car close
If your target vehicle runs on ARM, align CI execution accordingly. Using AWS Graviton and SOAFEE-aligned patterns ensures architectural parity, reducing porting issues and improving consistency.
Make traceability a by-product
Automate test-to-requirement links and evidence generation. When compliance artifacts are produced automatically with every build, audits become simple exports — not multi-week projects.
Conclusion
Virtual ECUs won’t replace hardware labs, but they fundamentally change how those labs are used. They enable front-loaded defect discovery, earlier validation of real network behavior, and automated generation of compliance artifacts, all of which dramatically accelerate integration and improve software quality. This technology is already reshaping how leading automotive companies develop, test, and validate complex vehicle software.
As virtual ECU capabilities mature, they will support more configurations, multi-ECU systems, and end-to-end SDV programs, resulting in stable release cycles and fewer late surprises. The direction is clear: virtual integration is no longer an experiment, it has become the new foundation of reliable, scalable, software-defined mobility.